


机器人运动控制器
最适合工业机器人的机器人专用控制器
机器人运动控制器
DMC-coreCon
基于实时Linux (Xenomai 2.6.5)的快速应答
实时EtherCAT Master stack支持 CoE (CANopen-over-EtherCAT)和高达4KHz的循环时间
便于实现GUI APP
可以搭载机器人运动控制器(coreCon)软件
通过HDMI或Ethernet连接示教器(移动型)或图示板
支持EtherCAT Master、Ethernet、RS-485等多种设备(支持各种通讯方式)
搭载非易失性磁性随机存储器(M-RAM)
高性能、小型化、轻量化、低耗电
获得CE、ISO 9001、ISO 14001国际认证

基本技术参数

处理器
i.MX6Q:Quad 1.0GHz
Cortex-A9 Core (11500 DMIPS)

屏幕
HDMI 1.4
1920×1080 分辨率

安装
壁挂式, DIN导轨式安装

存储器
DDR3 800MHz 1GB

操作系统
Embedded Linux 4.1.15
Real-time Linux (Xenomai) 2.6.5
Qt 4.8.7

尺寸
168x103x30mm

硬盘
eMMC 8GB (MLC type)
MRAM 2MB (Option)

通讯接口
EtherCAT, Ethernet,
CAN, RS-485

重量
500g
请在此下载 防暴型 DMC-coreCon产品说明书。
(二维码扫描或点击下载按钮)

coreCon
安装与配置
1. 快速安装

Select Robot Type

Driver Spec

Dimension

Work Range

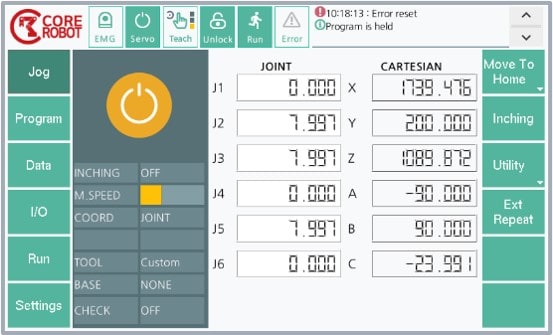
Jog
2. 示教
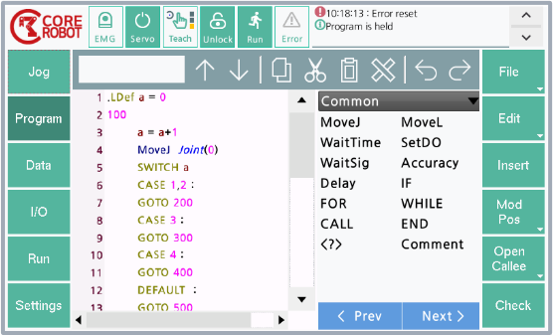
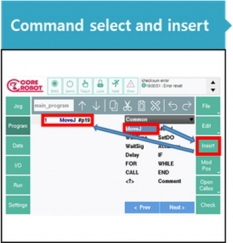
3. 编成
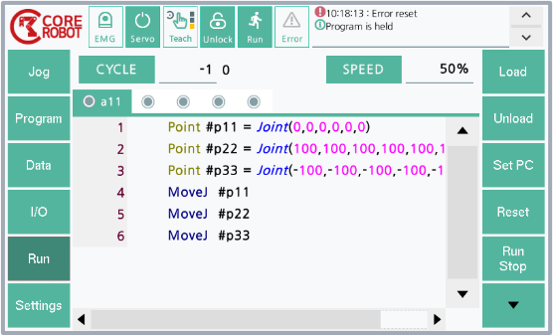
4. 执行
coreCon
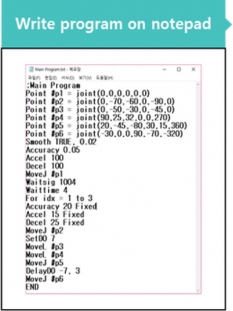
机器人作业编程
1. 在控制器上创建




2. 在PC上创建



coreCon