

Robot controller configuration diagram
机器人运动控制器, 移动型/手提型 (T/P) & 安全控制器
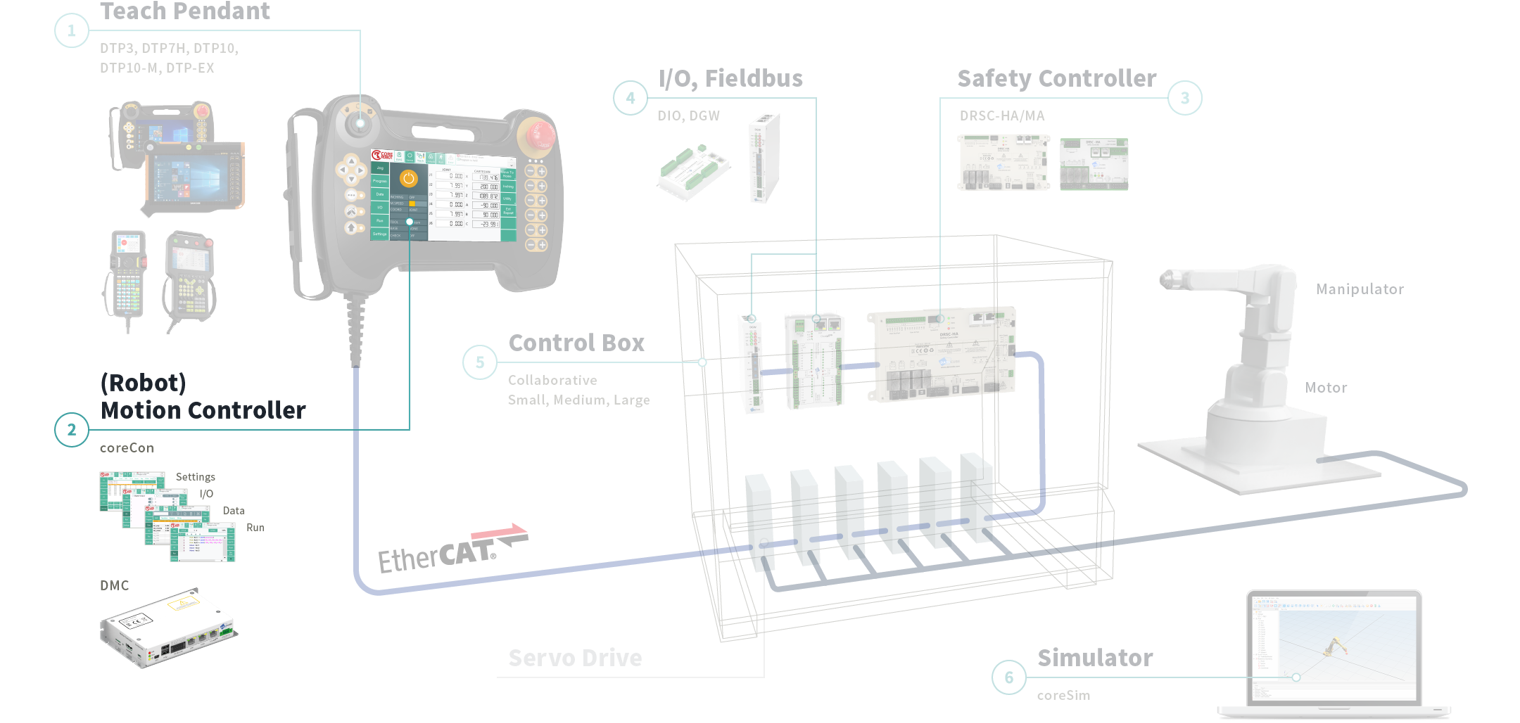
机器人运动控制器


DTP10-coreCon
运动控制器和示教器一体化 支持EtherCAT Master、Ethernet、RS-485等多种设备(支持各种通讯方式) 搭载非易失性磁性随机存储器…
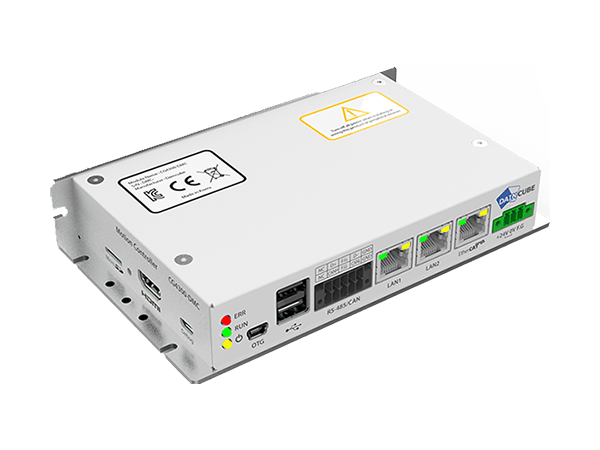
DMC-coreCon
基于实时Linux (Xenomai 2.6.5)的快速应答 实时EtherCAT Master stack支持 CoE (CANopen-over-EtherCAT)和高达4KHz的循环时间…