

Embedded Linux based EtherCAT Controller
Optimized for Industrial Robots.
Technical info

CPU
i.MX6Q:Quad 1.0GHz
Cortex-A9 Core (11500 DMIPS)

Display
HDMI 1.4
1920×1080 resolution

Mounting
Wall Mount
DIN Rail

Memory
DDR3 800MHz 1GB

OS
Embedded Linux 4.1.15
Real-time Linux (Xenomai) 2.6.5
Qt 4.8.7

Dimension
168x103x30mm

Storage
eMMC 8GB (MLC type)
MRAM 2MB (Option)

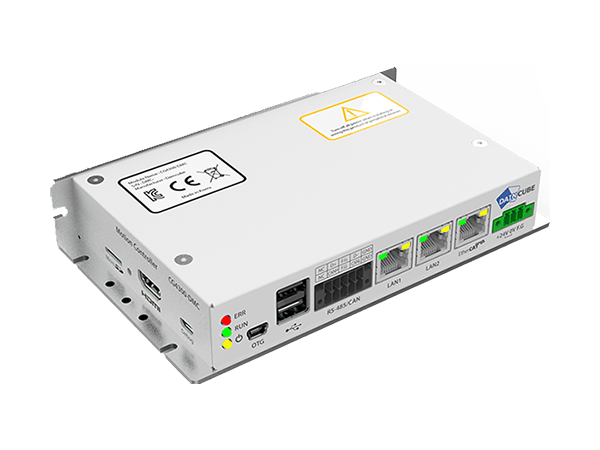
Interface
EtherCAT, Ethernet,
CAN, RS-485

Weight
500g
Download the product guide for the DAINCUBE DMC-L here.
(Click QR Code recognition or Download button)
