Robot Motion Controller for
Customer Custom UI and Language,
Kinematics, Motions, and Algorithms
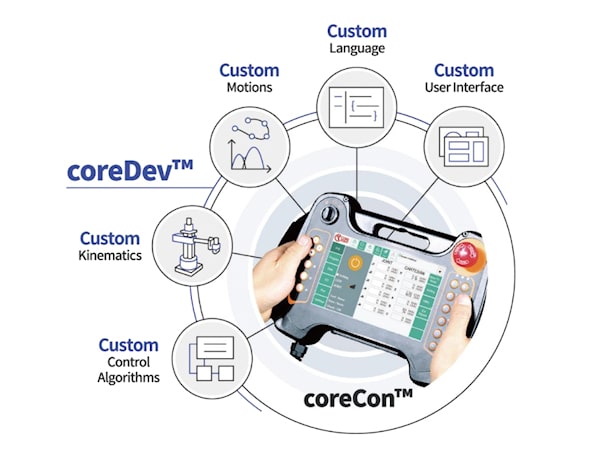
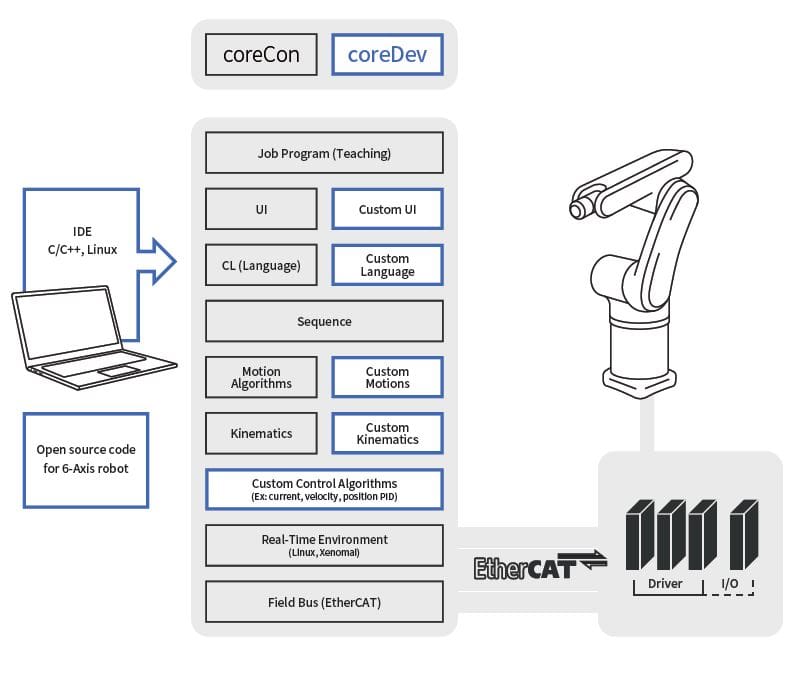
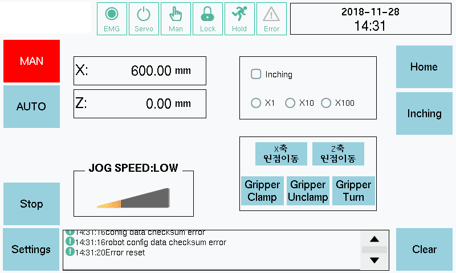
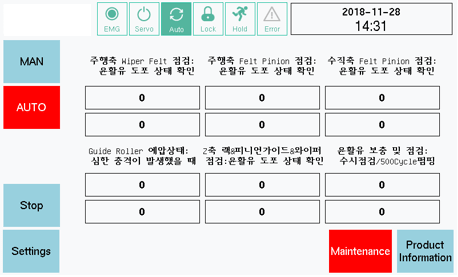
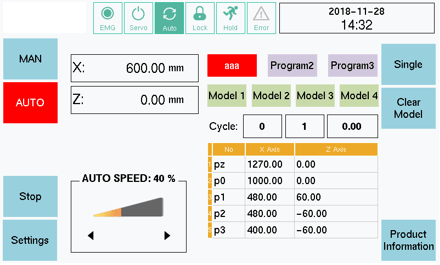
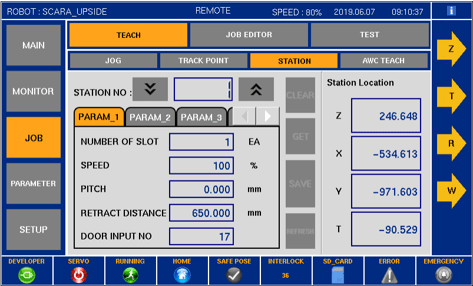
coreDev provides User Interface/Robot Language/Motion/Control Algorithms in plug-in form to the motion controller(i.e. coreCon) and provides S/W and development environment for easy development.
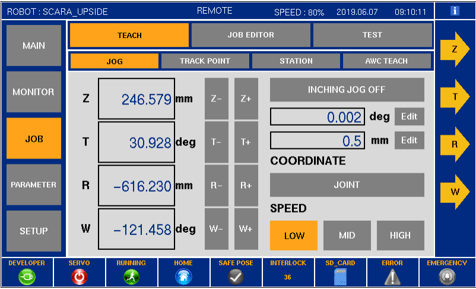
It provides a user S/W development environment for the development of Kinematics and Motions, Control Algorithms and Custom UI of the user robot along with coreCon-supported Teaching, Job Programming Language, Motion Control, Monitoring, and Setting Functions.
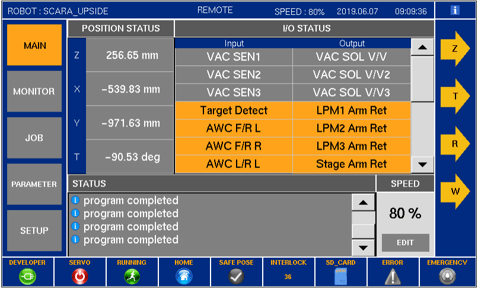
coreDev is designed as a plug-in Real-Time task operation structure and works with coreCon’s builtin function to enable the user’s professional application development.
In addition, information provided by the coreCon API(e.g. joint position/velocity/acceleration, End-Effector’s position/Orientation, torque feedback from motors, control parameters, etc.) can be used to effectively apply and develop the robot of the user algorithm.
Technical info

CPU
i.MX6Q:Quad 1.0GHz
Cortex-A9 Core (11500 DMIPS)

OS
Embedded Linux 4.1.15
Real-time Linux (Xenomai) 2.6.5
Qt 4.8.7

Memory
DDR3 800MHz 1GB

Interface
EtherCAT, Ethernet,
RS-485

Storage
eMMC 8GB (MLC type)
MRAM 2MB

Power Input
DC 24V
Download the product guide for the DAINCUBE coreDEV here.
(Click QR Code recognition or Download button)

S company
H company
D company