

Optimized for Industrial Robots.
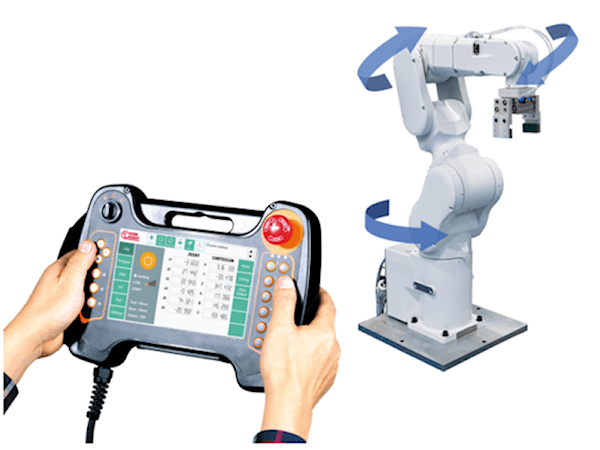
DTP7H-coreCon

Motion Controller
Motion Controller (DMC-coreCon)
Reduced Development Time - Immediate deployment with simple configuration, no programming required.
Custom Optimization - Supports development and application of customized robot kinematics.
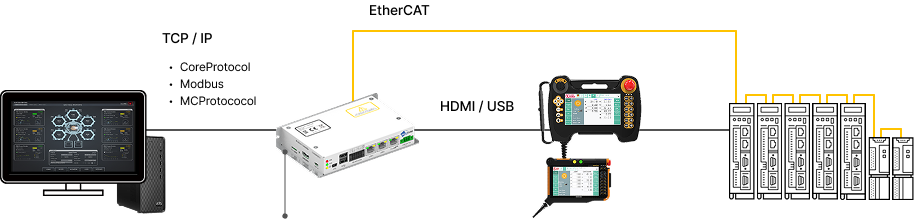
Integrated Control - Unified management of diverse robots through a single UI.
Easy Expansion - API library enables integration with higher-level systems.
Broad Compatibility - Seamless integration with EtherCAT servo drives from various manufacturers.
Simplified Wiring - Minimizes complex wiring for easy installation and maintenance.
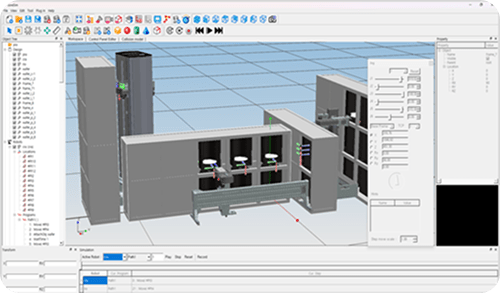
CoreSim - 3D Model-Based Simulator
Offline programming enables pre-verification without actual equipment: collision detection / cycle time analysis / layout validation. Reduces training, testing, and maintenance costs.
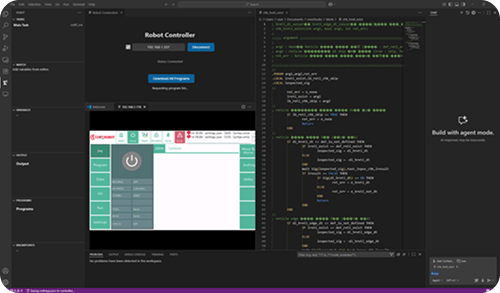
CoreStudio – A More Powerful and Smarter Development Environment
CL script IntelliSense, AI code recommendations, and automation. Remote debugging and data management. An all-in-one solution for efficient development and rapid validation.
Custom Kinematics
Daincube's motion controllers support not only standard robot kinematics (Cartesian, Serial, SCARA, Delta, UR6, etc.), but also custom kinematic structures desired by customers.
Virtual Axis
Virtual axes can be created independently of physical axes. Complex multi-joint structures can be integrated into simple logical axes → Simplified control algorithms.
Hint Function
In multi-arm environments, select operation modes by specifying constraints for each arm as Custom Hints (e.g., maintain relative angle, maintain specific position). This enables predictable and stable control of complex multi-joint structures.
Cofactor (Linkage Axis Compensation)
Mathematically compensate mechanically linked axes.
Vibration Reduction Function
The Daincube motion controller provides various vibration suppression functions to reduce residual vibration in equipment occurring within precision motion control environments. These functions support stable performance when robots and automation equipment perform high-speed, high-precision operations.
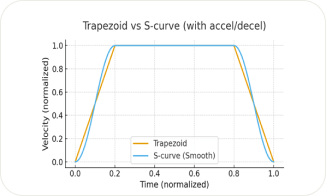
Smooth (S-curve)
Creates smooth acceleration/deceleration sections using an S-curve to mitigate shock and residual vibration
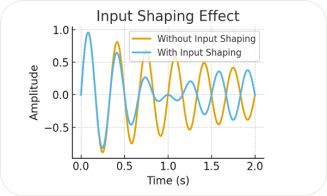
Input Shaping Filter
Pre-corrects command inputs to minimize resonant frequency (structural vibration) components
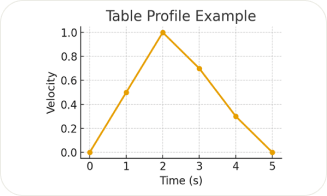
Table Profile
Optimizes process/structural characteristics using a user-defined profile based on a time-velocity table
Controller Advantages
Logging
- System / Operation / Driver Log
- TCP / MCProtocol / Modbus Communication Log
- NVRAM Debug Logging → Safe Recovery after Power Failure
Diagnostics
- EtherCAT Diagnostics: Cycle/Shift/Sync, Lost Frame, Working Count
- Slave Status / Bus Topology / Link Down Logging
- Axis Status: Servo On/Off, OP/Link Verification
Debugging
- Check Mode: Step-by-step safety verification
- Breakpoint & Watch View: Variable monitoring
- Debug Mode: Conveyor/Signal testing
- NVRAM Debug Logging → Safe recovery after power failure
Profile Analysis
- Chart Function: 5000-cycle recording/analysis
- Position / Velocity / Torque Comparison
- Frequency/Time Domain Analysis → Vibration & Tracking Error Verification
- Tuning · Performance Optimization · Anomaly Pattern Analysis
Simulation & UX
- The Dryrun feature enables safe and rapid pre-installation verification by executing program logic without driving actual equipment.
- Digital twin simulation integrated with 3D model-based coreSim enables pre-optimization of collisions, cycle times, and layouts.
- Custom UI API allows implementation of a customized UI reflecting the customer's identity.
Technical info

CPU
i.MX6Q:Quad 1.0GHz
Cortex-A9 Core (11500 DMIPS)

Display
7″
1024 x 600 resolution
Switch
Emergency stop, Select,
3 level Enabling

Memory
DDR3 800MHz 1GB

OS
Embedded Linux 4.1.15
Real-time Linux (Xenomai) 2.6.5
Qt 4.8.7
EtherCAT Master 1.5.2
File System ext4

Dimension
270x195x72mm

Storage
eMMC 8GB (MLC type)
MRAM 2MB (Option)

Interface
EtherCAT, Ethernet,
RS-485

Weight
1000g (Without Cable)
Setting & Configuration
1. Quick Setting

Select Robot Type

Driver Spec

Dimension

Work Range

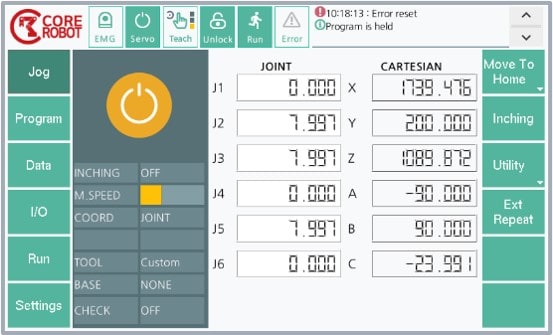
Jog
2. Jogging (Teaching)
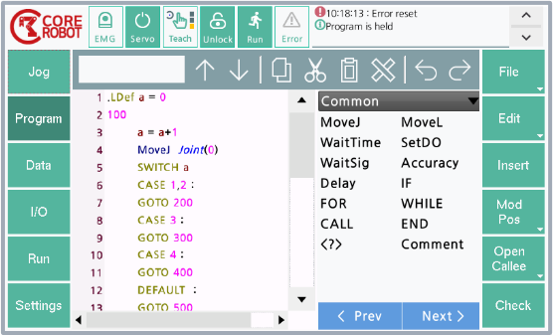
3. Programming
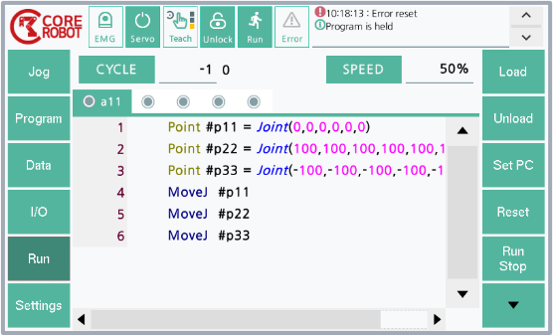
4. Run (Repeat)
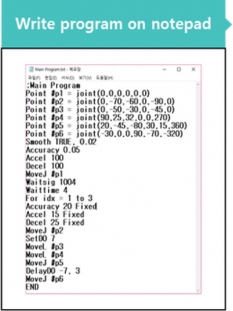
Robot Job Programming
1. How to Create on Controller




2. How to Create on PC



How it works
Example of 1-axis setting and operation DAINCUBE
Example of 6-axis robot and DRSC-HA setting and operationc DAINCUBE
Example of Robot language (CL Language) DAINCUBE
Example of DIO-32A setting and operation DAINCUBE
Q&A
Application Examples
Download
DMC-coreCon

Motion Controller
Motion Controller (DMC-coreCon)
Reduced Development Time - Immediate deployment with simple configuration, no programming required.
Custom Optimization - Supports development and application of customized robot kinematics.
Integrated Control - Unified management of diverse robots through a single UI.
Easy Expansion - API library enables integration with higher-level systems.
Broad Compatibility - Seamless integration with EtherCAT servo drives from various manufacturers.
Simplified Wiring - Minimizes complex wiring for easy installation and maintenance.
CoreSim - 3D Model-Based Simulator
Offline programming enables pre-verification without actual equipment: collision detection / cycle time analysis / layout validation. Reduces training, testing, and maintenance costs.
CoreStudio – A More Powerful and Smarter Development Environment
CL script IntelliSense, AI code recommendations, and automation. Remote debugging and data management. An all-in-one solution for efficient development and rapid validation.
Custom Kinematics
Daincube's motion controllers support not only standard robot kinematics (Cartesian, Serial, SCARA, Delta, UR6, etc.), but also custom kinematic structures desired by customers.
Virtual Axis
Virtual axes can be created independently of physical axes. Complex multi-joint structures can be integrated into simple logical axes → Simplified control algorithms.
Hint Function
In multi-arm environments, select operation modes by specifying constraints for each arm as Custom Hints (e.g., maintain relative angle, maintain specific position). This enables predictable and stable control of complex multi-joint structures.
Cofactor (Linkage Axis Compensation)
Mathematically compensate mechanically linked axes.
Vibration Reduction Function
The Daincube motion controller provides various vibration suppression functions to reduce residual vibration in equipment occurring within precision motion control environments. These functions support stable performance when robots and automation equipment perform high-speed, high-precision operations.
Smooth (S-curve)
가속/감속 구간을 S-curve로 매끄럽게 만들어 충격·잔류진동 완화
Input Shaping Filter
명령입력을사전보정해 공진주파수(구조진동) 성분을최소화
Table Profile
시간-속도 테이블 기반의 사용자 정의 프로파일로 공정/구조 특성 최적화
Controller Advantages
Logging
- System / Operation / Driver Log
- TCP / MCProtocol / Modbus Communication Log
- NVRAM Debug Logging → Safe Recovery after Power Failure
Diagnostics
- EtherCAT Diagnostics: Cycle/Shift/Sync, Lost Frame, Working Count
- Slave Status / Bus Topology / Link Down Logging
- Axis Status: Servo On/Off, OP/Link Verification
Debugging
- Check Mode: Step-by-step safety verification
- Breakpoint & Watch View: Variable monitoring
- Debug Mode: Conveyor/Signal testing
- NVRAM Debug Logging → Safe recovery after power failure
Profile Analysis
- Chart Function: 5000-cycle recording/analysis
- Position / Velocity / Torque Comparison
- Frequency/Time Domain Analysis → Vibration & Tracking Error Verification
- Tuning · Performance Optimization · Anomaly Pattern Analysis
Simulation & UX
- The Dryrun feature enables safe and rapid pre-installation verification by executing program logic without driving actual equipment.
- Digital twin simulation integrated with 3D model-based coreSim enables pre-optimization of collisions, cycle times, and layouts.
- Custom UI API allows implementation of a customized UI reflecting the customer's identity.
Technical info
CPU
i.MX6Q:Quad 1.0GHz
Cortex-A9 Core (11500 DMIPS)
Display
HDMI 1.4
1920×1080 resolution

Mounting
Wall Mount, DIN Rail
Memory
DDR3 800MHz 1GB
OS
Embedded Linux 4.1.15
Real-time Linux (Xenomai) 2.6.5
Qt 4.8.7
Dimension
168x103x30mm
Storage
eMMC 8GB (MLC type)
MRAM 2MB (Option)
Interface
EtherCAT, Ethernet,
CAN, RS-485
Weight
500g
Setting & Configuration
1. Quick Setting
Select Robot Type
Driver Spec
Dimension
Work Range
Jog
2. Jogging (Teaching)
3. Programming
4. Run (Repeat)
Robot Job Programming
1. How to Create on Controller
2. How to Create on PC
How it works
Example of 1-axis setting and operation DAINCUBE
Example of 6-axis robot and DRSC-HA setting and operationc DAINCUBE
Example of Robot language (CL Language) DAINCUBE
Example of DIO-32A setting and operation DAINCUBE
Q&A
Download
DMC-L
Technical info
CPU
i.MX6Q:Quad 1.0GHz
Cortex-A9 Core (11500 DMIPS)
Display
HDMI 1.4
1920×1080 resolution
Mounting
Wall Mount, DIN Rail
Memory
DDR3 800MHz 1GB
OS
Embedded Linux 4.1.15
Real-time Linux (Xenomai) 2.6.5
Qt 4.8.7
Dimension
168x103x30mm
Storage
eMMC 8GB (MLC type)
MRAM 2MB (Option)
Interface
EtherCAT, Ethernet,
CAN, RS-485
Weight