

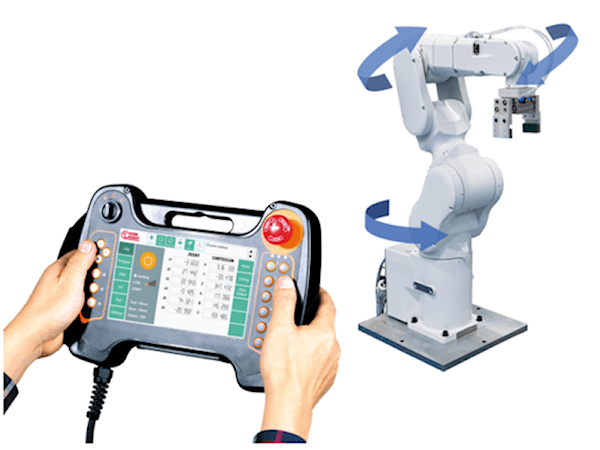
산업용 로봇에 최적화된 로봇 전용 제어기
DTP7H-coreCon

모션 제어기
모션 제어기 (DMC-coreCon)
개발 시간 단축 - 프로그램 개발 없이 간단한 설정만으로 즉시 적용 가능.
커스텀 최적화 - 맞춤형 로봇 기구학 개발 및 적용 지원.
통합 제어 - 하나의 UI로 다종다양한 로봇을 통합 관리.
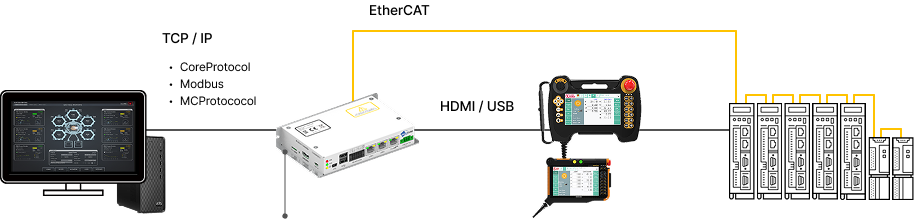
손쉬운 확장 - API 라이브러리 제공으로 상위 시스템과의 연동 가능.
폭넓은 호환성 - 다양한 제조사의 EtherCAT 서보 드라이브와 완벽 연동.
배선 간소화 - 복잡한 배선을 최소화하여 설치 및 유지보수 용이.
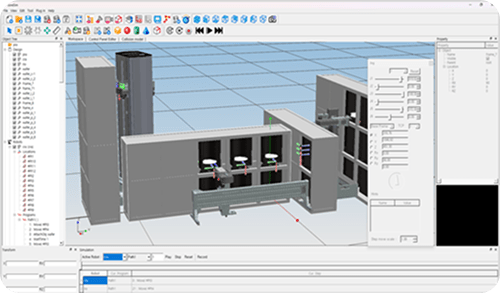
CoreSim - 3D 모델 기반 시뮬레이터
오프라인 프로그래밍으로 실제 장비 없이 사전 검증 충돌 검사 / 사이클타임 분석 / 레이아웃 검증 교육·테스트·유지보수 비용 절감
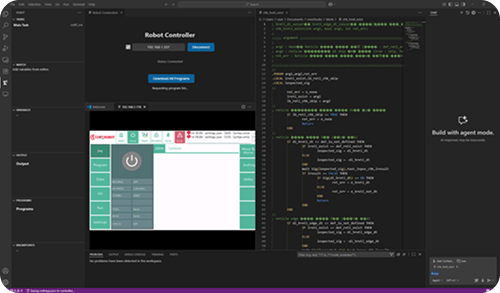
CoreStudio – 더 강력하고 더 스마트한 개발 환경
CL 스크립트 인텔리센스, AI 코드 추천 및 자동화. 원격 디버깅 및 데이터 관리 , 효율적인 개발과 빠른 검증을 위한 올인원 솔루션
고객 맞춤 기구학 (Custom Kinematics)
다인큐브의 모션 제어기는 표준 로봇 기구학((Cartesian, Serial, SCARA, Delta, UR6 등)뿐 아니라, 고객이 원하는 커스텀 기구 구조까지 지원합니다.
Virtual Axis (가상축)
실제 물리축과 별도로 가상의 축을 생성할 수 있습니다. 복잡한 다관절 구조도 단순한 논리 축으로 통합 가능 → 제어 알고리즘 단순화.
Hint 기능
Multi-Arm 환경에서 각 Arm의 구속조건을 Custom Hint로 지정하여 동작 모드를 선택할 수 있습니다. (ex 상대각 유지, 특정 위치 유지 등) 이를 통해 복잡한 다관절 구조도 예측 가능하고 안정적인 제어가 가능합니다.
Cofactor (연동축 보정)
기구적으로 연동된 축을 수학적으로 보정 가능합니다.
진동 감소 기능
다인큐브의 모션 제어기는 정밀 모션 제어 환경에서 발생하는 장비의 잔류 진동(residual vibration)을 줄이기 위해 다양한 진동 억제 기능을 제공합니다. 이 기능들은 로봇 및 자동화 장비가 고속·고정밀 동작을 수행할 때 안정적인 성능을 확보하도록 지원합니다.
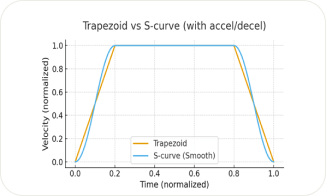
Smooth (S-curve)
가속/감속 구간을 S-curve로 매끄럽게 만들어 충격·잔류진동 완화
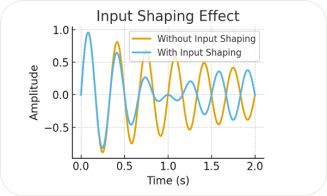
Input Shaping Filter
명령입력을사전보정해 공진주파수(구조진동) 성분을최소화
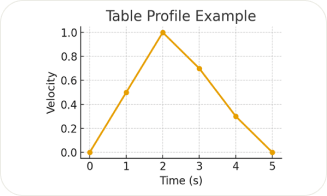
Table Profile
시간-속도 테이블 기반의 사용자 정의 프로파일로 공정/구조 특성 최적화
제어기 특장점
로깅 (Logging)
- System / Operation / Driver Log
- TCP / MCProtocol / Modbus 통신 로그
- NVRAM Debug Logging → 정전 후 Safe Recovery
진단 (Diagnostics)
- EtherCAT 진단: Cycle/Shift/Sync, Lost Frame, Working Count
- Slave Status / Bus Topology / Link Down 기록
- Axis 상태: Servo On/Off, OP/Link 확인
디버깅 (Debugging)
- Check 모드: Step 단위 안전 검증
- Break Point & Watch View: 변수 모니터링
- Debug Mode: Conveyor/Signal 테스트
- NVRAM Debug Logging → 정전 후 Safe Recovery
분석 (Profile Analysis)
- Chart 기능: 5000 Cycle 기록/분석
- Position / Velocity / Torque 비교
- Freq/Time Domain 분석 → 진동·추종오차 확인
- 튜닝·성능 최적화·이상 패턴 분석
시뮬레이션 & UX (Simulation & UX)
- Dryrun 기능을 통해 실제 장비를 구동하지 않고 프로그램 로직만 실행해 설치 전 안전하고 빠른 검증이 가능합니다.
- 3D 모델 기반의 coreSim과 연동한 디지털 트윈 시뮬레이션으로 충돌·사이클타임·레이아웃을 사전에 최적화할 수 있습니다.
- Custom UI API를 통해 고객의 아이덴티티가 반영된 맞춤형 UI를 적용할 수 있습니다.
Technical info

CPU
i.MX6Q:Quad 1.0GHz
Cortex-A9 Core (11500 DMIPS)

Display
7″
1024 x 600 resolution
Switch
Emergency stop, Select,
3 level Enabling

Memory
DDR3 800MHz 1GB

OS
Embedded Linux 4.1.15
Real-time Linux (Xenomai) 2.6.5
Qt 4.8.7
EtherCAT Master 1.5.2
File System ext4

Dimension
270x195x72mm

Storage
eMMC 8GB (MLC type)
MRAM 2MB (Option)

Interface
EtherCAT, Ethernet,
RS-485

Weight
1000g (Without Cable)
Setting & Configuration
1. Quick Setting

Select Robot Type

Driver Spec

Dimension

Work Range

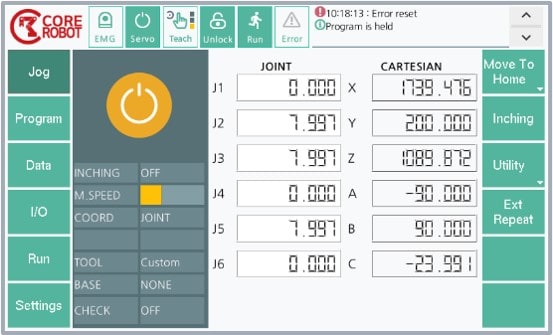
Jog
2. Jogging (Teaching)
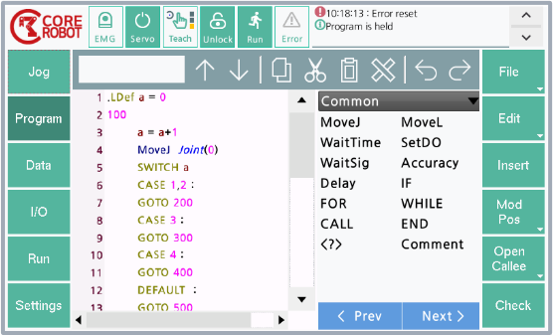
3. Programming
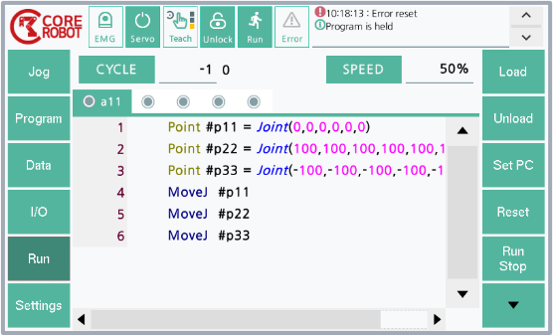
4. Run (Repeat)
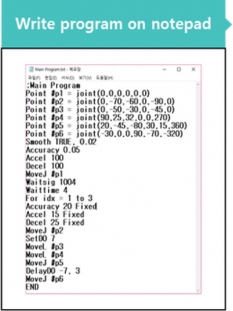
Robot Job Programming
1. How to Create on Controller




2. How to Create on PC



How it works
Example of 1-axis setting and operation DAINCUBE
Example of 6-axis robot and DRSC-HA setting and operationc DAINCUBE
Example of Robot language (CL Language) DAINCUBE
Example of DIO-32A setting and operation DAINCUBE
Q&A
적용사례
다운로드
DMC-coreCon

모션 제어기
모션 제어기 (DMC-coreCon)
개발 시간 단축 - 프로그램 개발 없이 간단한 설정만으로 즉시 적용 가능.
커스텀 최적화 - 맞춤형 로봇 기구학 개발 및 적용 지원.
통합 제어 - 하나의 UI로 다종다양한 로봇을 통합 관리.
손쉬운 확장 - API 라이브러리 제공으로 상위 시스템과의 연동 가능.
폭넓은 호환성 - 다양한 제조사의 EtherCAT 서보 드라이브와 완벽 연동.
배선 간소화 - 복잡한 배선을 최소화하여 설치 및 유지보수 용이.
CoreSim - 3D 모델 기반 시뮬레이터
오프라인 프로그래밍으로 실제 장비 없이 사전 검증 충돌 검사 / 사이클타임 분석 / 레이아웃 검증 교육·테스트·유지보수 비용 절감
CoreStudio – 더 강력하고 더 스마트한 개발 환경
CL 스크립트 인텔리센스, AI 코드 추천 및 자동화. 원격 디버깅 및 데이터 관리 , 효율적인 개발과 빠른 검증을 위한 올인원 솔루션
고객 맞춤 기구학 (Custom Kinematics)
다인큐브의 모션 제어기는 표준 로봇 기구학((Cartesian, Serial, SCARA, Delta, UR6 등)뿐 아니라, 고객이 원하는 커스텀 기구 구조까지 지원합니다.
Virtual Axis (가상축)
실제 물리축과 별도로 가상의 축을 생성할 수 있습니다. 복잡한 다관절 구조도 단순한 논리 축으로 통합 가능 → 제어 알고리즘 단순화.
Hint 기능
Multi-Arm 환경에서 각 Arm의 구속조건을 Custom Hint로 지정하여 동작 모드를 선택할 수 있습니다. (ex 상대각 유지, 특정 위치 유지 등) 이를 통해 복잡한 다관절 구조도 예측 가능하고 안정적인 제어가 가능합니다.
Cofactor (연동축 보정)
기구적으로 연동된 축을 수학적으로 보정 가능합니다.
진동 감소 기능
다인큐브의 모션 제어기는 정밀 모션 제어 환경에서 발생하는 장비의 잔류 진동(residual vibration)을 줄이기 위해 다양한 진동 억제 기능을 제공합니다. 이 기능들은 로봇 및 자동화 장비가 고속·고정밀 동작을 수행할 때 안정적인 성능을 확보하도록 지원합니다.
Smooth (S-curve)
가속/감속 구간을 S-curve로 매끄럽게 만들어 충격·잔류진동 완화
Input Shaping Filter
명령입력을사전보정해 공진주파수(구조진동) 성분을최소화
Table Profile
시간-속도 테이블 기반의 사용자 정의 프로파일로 공정/구조 특성 최적화
제어기 특장점
로깅 (Logging)
- System / Operation / Driver Log
- TCP / MCProtocol / Modbus 통신 로그
- NVRAM Debug Logging → 정전 후 Safe Recovery
진단 (Diagnostics)
- EtherCAT 진단: Cycle/Shift/Sync, Lost Frame, Working Count
- Slave Status / Bus Topology / Link Down 기록
- Axis 상태: Servo On/Off, OP/Link 확인
디버깅 (Debugging)
- Check 모드: Step 단위 안전 검증
- Break Point & Watch View: 변수 모니터링
- Debug Mode: Conveyor/Signal 테스트
- NVRAM Debug Logging → 정전 후 Safe Recovery
분석 (Profile Analysis)
- Chart 기능: 5000 Cycle 기록/분석
- Position / Velocity / Torque 비교
- Freq/Time Domain 분석 → 진동·추종오차 확인
- 튜닝·성능 최적화·이상 패턴 분석
시뮬레이션 & UX (Simulation & UX)
- Dryrun 기능을 통해 실제 장비를 구동하지 않고 프로그램 로직만 실행해 설치 전 안전하고 빠른 검증이 가능합니다.
- 3D 모델 기반의 coreSim과 연동한 디지털 트윈 시뮬레이션으로 충돌·사이클타임·레이아웃을 사전에 최적화할 수 있습니다.
- Custom UI API를 통해 고객의 아이덴티티가 반영된 맞춤형 UI를 적용할 수 있습니다.
Technical info
CPU
i.MX6Q:Quad 1.0GHz
Cortex-A9 Core (11500 DMIPS)
Display
HDMI 1.4
1920×1080 resolution

Mounting
Wall Mount, DIN Rail
Memory
DDR3 800MHz 1GB
OS
Embedded Linux 4.1.15
Real-time Linux (Xenomai) 2.6.5
Qt 4.8.7
Dimension
168x103x30mm
Storage
eMMC 8GB (MLC type)
MRAM 2MB (Option)
Interface
EtherCAT, Ethernet,
CAN, RS-485
Weight
500g
Setting & Configuration
1. Quick Setting
Select Robot Type
Driver Spec
Dimension
Work Range
Jog
2. Jogging (Teaching)
3. Programming
4. Run (Repeat)
Robot Job Programming
1. How to Create on Controller
2. How to Create on PC
How it works
Example of 1-axis setting and operation DAINCUBE
Example of 6-axis robot and DRSC-HA setting and operationc DAINCUBE
Example of Robot language (CL Language) DAINCUBE
Example of DIO-32A setting and operation DAINCUBE
Q&A
다운로드
DMC-L
Technical info
CPU
i.MX6Q:Quad 1.0GHz
Cortex-A9 Core (11500 DMIPS)
Display
HDMI 1.4
1920×1080 resolution
Mounting
Wall Mount, DIN Rail
Memory
DDR3 800MHz 1GB
OS
Embedded Linux 4.1.15
Real-time Linux (Xenomai) 2.6.5
Qt 4.8.7
Dimension
168x103x30mm
Storage
eMMC 8GB (MLC type)
MRAM 2MB (Option)
Interface
EtherCAT, Ethernet,
CAN, RS-485
Weight