

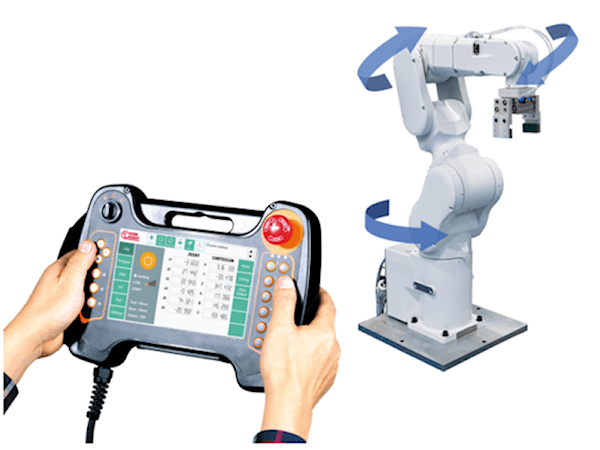
最适合工业机器人的机器人专用控制器
DTP7H-coreCon

运动控制器
运动控制器 (DMC-coreCon)
缩短开发周期 - 无需编程,简单设置即可立即应用。
定制化优化 - 支持定制化机器人机构开发与应用。
集成控制 - 通过单一界面统一管理多种机器人。
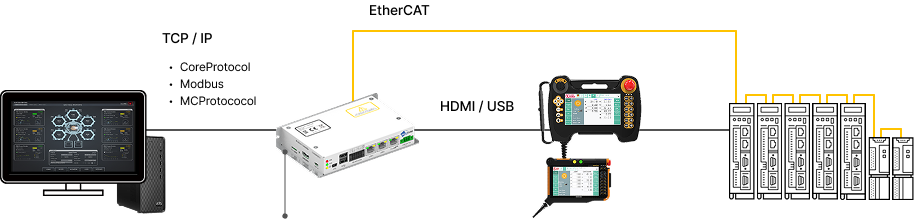
便捷扩展 - 提供API库实现与上层系统的联动。
广泛兼容性 - 与各厂商EtherCAT伺服驱动器完美联动。
简化布线 - 最大限度减少复杂布线,便于安装与维护。
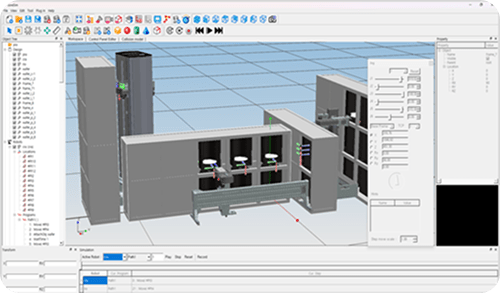
CoreSim - 基于3D模型的仿真器
通过离线编程实现无需实际设备的前期验证:碰撞检测/循环时间分析/布局验证,有效降低培训·测试·维护成本
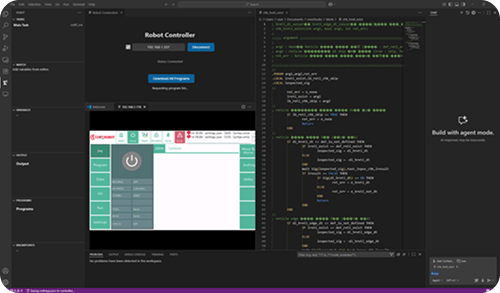
CoreStudio – 更强大更智能的开发环境
CL脚本智能感知、AI代码推荐与自动化。远程调试及数据管理,提供高效开发与快速验证的一体化解决方案
客户定制运动学(Custom Kinematics)
多因立方运动控制器不仅支持标准机器人运动学(笛卡尔、串联、SCARA、Delta、UR6等),更能实现客户所需的定制化机构结构。
虚拟轴(Virtual Axis)
可独立于物理轴创建虚拟轴。复杂多关节结构可整合为简易逻辑轴→实现控制算法简化。
提示功能
在多臂环境中,可通过自定义提示设定各机械臂约束条件以选择运行模式(如保持相对角度、维持特定位置等)。由此实现对复杂多关节结构的可预测稳定控制。
协变量(联动轴校正)
可对机构联动轴进行数学校正。
减振功能
多因库伯运动控制器提供多种振动抑制功能,旨在减少精密运动控制环境中设备产生的残余振动。这些功能可确保机器人及自动化设备在高速高精度运行时保持稳定性能。
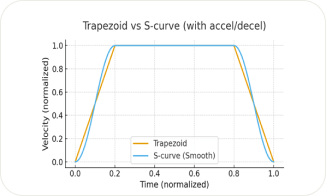
平滑(S曲线)
通过S曲线平滑加速/减速区间,减轻冲击与残余振动
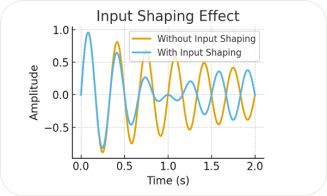
输入整形滤波器
预先校正指令输入,最小化共振频率(结构振动)成分
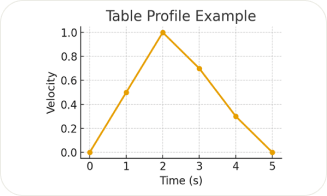
表格轮廓
基于时速表的用户自定义轮廓,优化工艺/结构特性
控制器特点
日志记录 (Logging)
- 系统/运行/驱动程序日志
- TCP/MCProtocol/Modbus通信日志
- NVRAM调试日志记录 → 断电后安全恢复
诊断 (Diagnostics)
- EtherCAT诊断:周期/移位/同步、丢帧、工作计数
- 从站状态/总线拓扑/链路断开记录
- 轴状态:伺服启停、操作/链路确认
调试 (Debugging)
- 检查模式:步进单位安全验证
- 断点与监视视图:变量监控
- 调试模式:输送带/信号测试
- NVRAM调试日志记录 → 断电后安全恢复
分析 (Profile Analysis)
- 图表功能:5000周期记录/分析
- 位置/速度/扭矩对比
- 频域/时域分析 → 振动·跟踪误差检测
- 调试·性能优化·异常模式分析
仿真与用户体验 (Simulation & UX)
- 通过Dryrun功能,无需驱动实际设备即可执行程序逻辑,实现安装前的安全快速验证。
- 基于3D模型的coreSim联动数字孪生仿真,可预先优化碰撞·循环时间·布局。
- 通过Custom UI API实现客户专属定制化界面,充分体现品牌个性。
基本技术参数

处理器
i.MX6Q:Quad 1.0GHz
Cortex-A9 Core (11500 DMIPS)

屏幕
7英寸
1024 x 600 分辨率
开关
紧急停止开关,选择开关,
三档使能开关

存储器
DDR3 800MHz 1GB

操作系统
Embedded Linux 4.1.15
Real-time Linux (Xenomai) 2.6.5
Qt 4.8.7
EtherCAT Master 1.5.2
File System ext4

尺寸
270x195x72mm

硬盘
eMMC 8GB (MLC type)
MRAM 2MB (Option)

通讯接口
EtherCAT, Ethernet,
RS-485

重量
1000g (不包括电缆)
Setting & Configuration
1. Quick Setting

Select Robot Type

Driver Spec

Dimension

Work Range

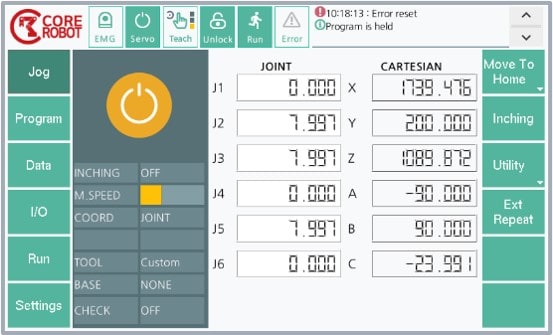
Jog
2. Jogging (Teaching)
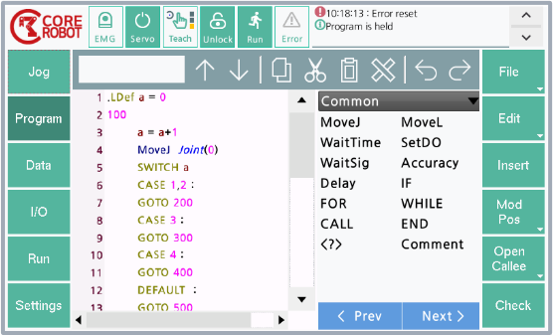
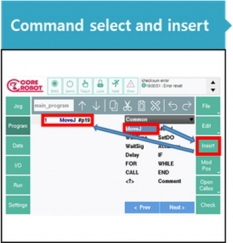
3. Programming
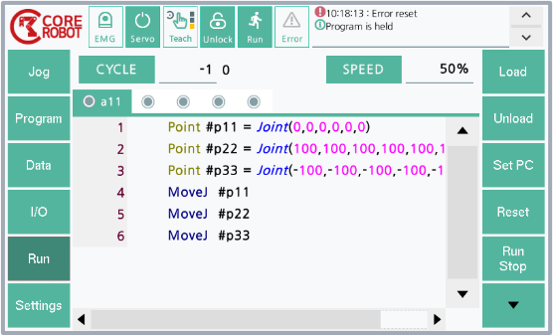
4. Run (Repeat)
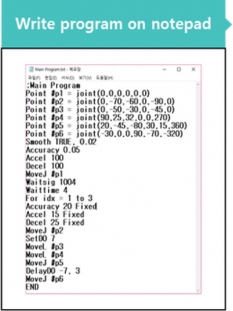
Robot Job Programming
1. How to Create on Controller




2. How to Create on PC



How it works
Example of 1-axis setting and operation DAINCUBE
Example of 6-axis robot and DRSC-HA setting and operationc DAINCUBE
Example of Robot language (CL Language) DAINCUBE
Example of DIO-32A setting and operation DAINCUBE
Q&A
应用案例
下载
DMC-coreCon

运动控制器
运动控制器 (DMC-coreCon)
缩短开发周期 - 无需编程,简单设置即可立即应用。
定制化优化 - 支持定制化机器人机构开发与应用。
集成控制 - 通过单一界面统一管理多种机器人。
便捷扩展 - 提供API库实现与上层系统的联动。
广泛兼容性 - 与各厂商EtherCAT伺服驱动器完美联动。
简化布线 - 最大限度减少复杂布线,便于安装与维护。
CoreSim - 基于3D模型的仿真器
通过离线编程实现无需实际设备的前期验证:碰撞检测/循环时间分析/布局验证,有效降低培训·测试·维护成本
CoreStudio – 更强大更智能的开发环境
CL脚本智能感知、AI代码推荐与自动化。远程调试及数据管理,提供高效开发与快速验证的一体化解决方案
客户定制运动学(Custom Kinematics)
多因立方运动控制器不仅支持标准机器人运动学(笛卡尔、串联、SCARA、Delta、UR6等),更能实现客户所需的定制化机构结构。
虚拟轴(Virtual Axis)
可独立于物理轴创建虚拟轴。复杂多关节结构可整合为简易逻辑轴→实现控制算法简化。
提示功能
在多臂环境中,可通过自定义提示设定各机械臂约束条件以选择运行模式(如保持相对角度、维持特定位置等)。由此实现对复杂多关节结构的可预测稳定控制。
协变量(联动轴校正)
可对机构联动轴进行数学校正。
减振功能
多因库伯运动控制器提供多种振动抑制功能,旨在减少精密运动控制环境中设备产生的残余振动。这些功能可确保机器人及自动化设备在高速高精度运行时保持稳定性能。
Smooth (S-curve)
가속/감속 구간을 S-curve로 매끄럽게 만들어 충격·잔류진동 완화
Input Shaping Filter
명령입력을사전보정해 공진주파수(구조진동) 성분을최소화
Table Profile
시간-속도 테이블 기반의 사용자 정의 프로파일로 공정/구조 특성 최적화
Controller Advantages
日志记录 (Logging)
- 系统/运行/驱动程序日志
- TCP/MCProtocol/Modbus通信日志
- NVRAM调试日志记录 → 断电后安全恢复
诊断 (Diagnostics)
- EtherCAT诊断:周期/移位/同步、丢帧、工作计数
- 从站状态/总线拓扑/链路断开记录
- 轴状态:伺服启停、操作/链路确认
调试 (Debugging)
- 检查模式:步进单位安全验证
- 断点与监视视图:变量监控
- 调试模式:输送带/信号测试
- NVRAM调试日志记录 → 断电后安全恢复
分析 (Profile Analysis)
- 图表功能:5000周期记录/分析
- 位置/速度/扭矩对比
- 频域/时域分析 → 振动·跟踪误差检测
- 调试·性能优化·异常模式分析
仿真与用户体验 (Simulation & UX)
- 通过Dryrun功能,无需驱动实际设备即可执行程序逻辑,实现安装前的安全快速验证。
- 基于3D模型的coreSim联动数字孪生仿真,可预先优化碰撞·循环时间·布局。
- 通过Custom UI API实现客户专属定制化界面,充分体现品牌个性。
基本技术参数
处理器
i.MX6Q:Quad 1.0GHz
Cortex-A9 Core (11500 DMIPS)
屏幕
HDMI 1.4
1920×1080 分辨率

安装
壁挂式, DIN导轨式安装
存储器
DDR3 800MHz 1GB
操作系统
Embedded Linux 4.1.15
Real-time Linux (Xenomai) 2.6.5
Qt 4.8.7
尺寸
168x103x30mm
硬盘
eMMC 8GB (MLC type)
MRAM 2MB (Option)
Interface
EtherCAT, Ethernet,
CAN, RS-485
重量
500g
Setting & Configuration
1. Quick Setting
Select Robot Type
Driver Spec
Dimension
Work Range
Jog
2. Jogging (Teaching)
3. Programming
4. Run (Repeat)
Robot Job Programming
1. How to Create on Controller
2. How to Create on PC
How it works
Example of 1-axis setting and operation DAINCUBE
Example of 6-axis robot and DRSC-HA setting and operationc DAINCUBE
Example of Robot language (CL Language) DAINCUBE
Example of DIO-32A setting and operation DAINCUBE
Q&A
下载
DMC-L
基本技术参数
处理器
i.MX6Q:Quad 1.0GHz
Cortex-A9 Core (11500 DMIPS)
屏幕
HDMI 1.4
1920×1080 分辨率
安装
壁挂式,
DIN导轨式安装
存储器
DDR3 800MHz 1GB
操作系统
Embedded Linux 4.1.15
Real-time Linux (Xenomai) 2.6.5
Qt 4.8.7
尺寸
168x103x30mm
硬盘
eMMC 8GB (MLC type)
MRAM 2MB (Option)
通讯接口
EtherCAT, Ethernet,
CAN, RS-485
重量