


Robot Controller
산업용 로봇에 최적화된 로봇 전용 제어기
Robot Motion Controller
DMC-coreCon
Real-time Linux (Xenomai 2.6.5) 기반의 빠른 응답 속도
CoE(CANopen-over-EtherCAT)과 최대 4KHz cycle time을 지원하는 실시간 EtherCAT Master stack
GUI 애플리케이션 구현 용이
로봇 모션 제어기 (coreCon) software 탑재 가능
HDMI 또는 Ethernet을 통해 Teach Pendant(Mobile Panel) 또는 Graphic panel 연결
EtherCAT Master, Ethernet, CAN, RS-485 등의 다양한 디바이스 지원 -> 통신 방식 지원
고속 비휘발성 메모리 (M-RAM) 탑재
고성능, 소형화, 경량화, 저전력화 실현
국제 표준 품질 인증 (CE, ISO 9001, ISO 14001)

Technical info

CPU
i.MX6Q:Quad 1.0GHz
Cortex-A9 Core (11500 DMIPS)

Display
HDMI 1.4
1920×1080 resolution

Mounting
Wall Mount, DIN Rail

Memory
DDR3 800MHz 1GB

OS
Embedded Linux 4.1.15
Real-time Linux (Xenomai) 2.6.5
Qt 4.8.7

Dimension
168x103x30mm

Storage
eMMC 8GB (MLC type)
MRAM 2MB (Option)

Interface
EtherCAT, Ethernet,
CAN, RS-485

Weight
500g
여기에서 다인큐브 DMC-coreCon에 대한 제품 안내서를 내려받으십시오.
(QR 코드 인식 또는 다운로드 버튼 클릭)

coreCon
Setting & Configuration
1. Quick Setting

Select Robot Type

Driver Spec

Dimension

Work Range

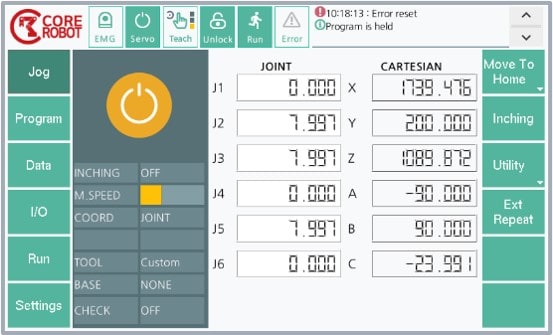
Jog
2. Jogging (Teaching)
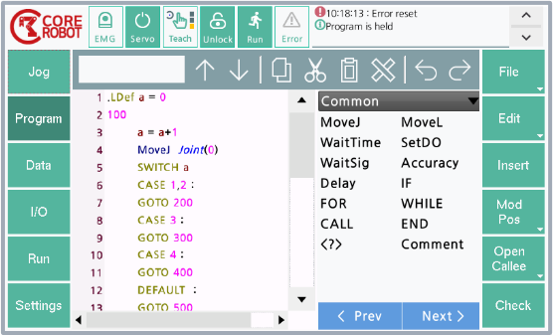
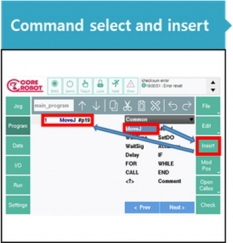
3. Programming
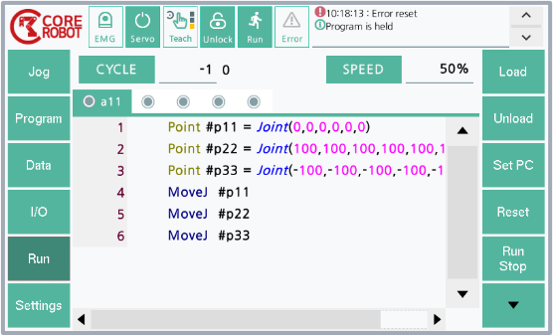
4. Run (Repeat)
coreCon
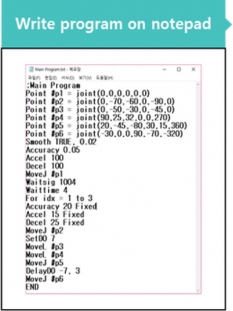
Robot Job Programming
1. How to Create on Controller




2. How to Create on PC



coreCon