

Robot controller configuration diagram
Robot Motion Controller, T/P & Safety Controller
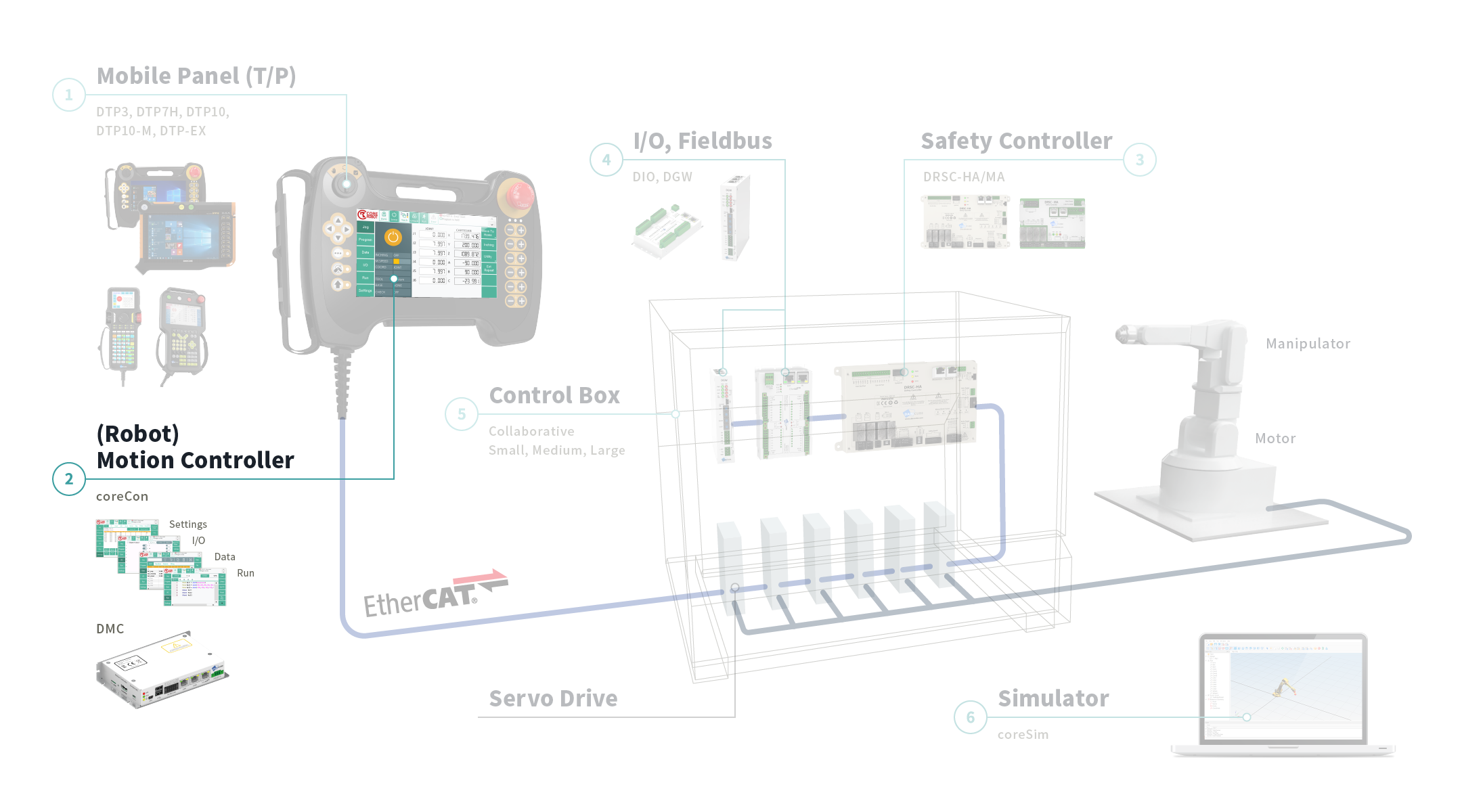
(Robot) Motion Controller

DTP7H-coreCon
7인치 Mobile (Handy) Handheld Type 과 다양한 운영체제를 지원하는 Embedded Type (지원 운영체제 : Windows 10 IoT Enterprise…

DTP10-coreCon
10인치 Mobile Handheld Type 과 다양한 운영체제를 지원하는 Embedded Type (지원 운영체제 : Windows 10 IoT Enterprise…
DMC-coreCon
로봇 모션 제어 S/W인 coreCon은 다양한 로봇(Multi-Axis, Delta, SCARA, Cartesian and Cobot 등) 선택과 EtherCAT Slave의 간단한 설정과…